
|
|
|||||||
| Selbstbauer von neuen Booten und solche die es werden wollen. |
 |
  |
|
|
Themen-Optionen |
|
#2101
 13.04.2022, 10:37
13.04.2022, 10:37
|
||||
|
||||
|
Hallo Günter,
für diese Anwendung bietet sich auf jeden Fall 7x19-Draht an, der ist am flexibelsten. 4mm scheint mir recht dick. In diesem Video https://www.youtube.com/watch?v=1x_vrY24z4o verwendet er 3mm mit Kunststoffmantel (in einem der Kommentare beantwortet) und zeigt auch anschaulich, wie man es (nicht) machen sollte
__________________
LG, Holger _\|/_ Das Gras wächst nicht schneller, wenn man dran zieht _\|/_  Im Bau: Eco 65 classic "Galadriel" YachtClub Warnow e.V. 

|
|
#2102
13.04.2022, 21:03
|
||||
|
||||
|
Danke Holger,
ja, 7 * 19er Draht habe ich damals schon gekauft, aber in Bezug auf die Drahtstärke hat mich wohl Denken à-la "sicher ist sicher" auf die Fährte der Überdimensionierung gesetzt. Aber mein Bauchgefühl, dass das Seil zu dick für diese Rollen ist, hat nicht getrogen: Ich habe seither bei einer Fachfirma die Angabe gefunden, dass der Durchmesser einer Seilscheibe das 30fache des Drahtseildurchmessers betragen soll, sonst müsse man mit einem früheren Ableben des Seiles rechnen. Naja, 4 mm * 30 = 120 mm, das sind ja doch schon ziemliche Trullen. Ich habe jetzt 2-mm-Seil bestellt. Bevor jemand anderes das Thema anspricht: ich las vor längerer Zeit, dass man für Seilsteuerung auch gut Dyneema-Leinen verwenden könne, die sehr wenig Reck aufweisen. Ich habe damit eine Probeinstallation gemacht und gefunden, dass der Reck für meinen Geschmack für diesen Zweck viel zu groß ist.
__________________
Gruß, Günter
|
||||
|
#2103
13.04.2022, 21:22
|
||||
|
||||
|
Heute habe ich den Probeaufbau der elektrischen AB-Steuerung mit HT-Servo getestet. Das Ergebnis war für mich sehr ernüchternd. Ich bin froh, dass ich parallel die konventionelle Seilsteuerung vorgerichtet habe.
Ich hatte ja vorab Bedenken, ob die Steifigkeit meiner laienhaft konstruierten und gebauten Servo-Konsole ausreicht. Das sieht erstmal gut aus. Der Hase liegt woanders im Pfeffer. Hauptsächlich ist es die Größe des Trägheitsmoments des Motors in Bezug auf die Drehung des (senkrechten) Motorschaftes. Trotz der starken Getriebeuntersetzung des Servos ruckt es stark, wenn ich auch nur eine winzige Kurskorrektur vorgebe, also ganz wenig am Poti drehe. Besonders stark ist der Ruck, wenn ich die Drehichtung wechsle, was ja beim Steuern zum Kurshalten die ganze Zeit passiert. Jedes Zahnradpaar hat ja ein kleines Spiel und das Getriebe ist sicher mehrstufig, also addieren sich diese Spiele. Wenn also der Servomotor seine Drehrichtung wechselt, "spürt er" erstmal so gut wie keinen Widerstand, bis das gesamte Getriebespiel überwunden ist. Auch wenn das nur Zehntel von Sekunden sind, hat der Motor schon eine gewisse Drehgeschwindigkeit erreicht und es ruckt dann stärker, wenn er das Trägheitsmoment des Außenbordmotors zu spüren bekommt. Dazu kommen Steuerbefehle, die sich der Servo nur "einbildet", weil sich durch irgendwelche Einflüsse der Spannungsabgriff ändert, ohne, dass ich am Poti drehe. Manchmal stottert das Gerät aus ähnlichen Gründen. Ich glaube, bis auf Weiteres werde ich erstmal nur auf Seilsteuerung setzen.
__________________
Gruß, Günter Geändert von Heimfried (13.04.2022 um 21:29 Uhr)
|
||||
|
#2104
14.04.2022, 06:28
|
||||
|
||||
|
Morgen Günter! Morgen Ihr alle!
Vielleicht hilft es wenn Du den Motorkreis etwas "weicher" machst. Elektrisch geht das recht gut durch Einfügen eines kleinen ohmschen Widerstands in den Ankerkreis. Sinnigerweise sollte der zwischen Servoelektronik und Stellmotor sitzen. So aus dem hohlen Bauch würde ich mit einem Ohm (2-10W) anfangen zu probieren, dann siehst schon ob das der richtige Weg ist. Ich habe ähnliches Problem an meinem Lenkmotor. Der war in einem früheren Leben eine Pinnenautomatik und geht recht heftig zu Werke wenn mit 12V direkt angesteuert. Ich hab dem jetzt Leistungs-Z-Dioden (10W) und eine kleine Transistorschaltung in Serie verbaut damit er etwas sachter zur Sache kommt. Tut. Also für Feintuning ist auch Platz. Gruß, der Stefan Geändert von baffe (14.04.2022 um 06:43 Uhr)
|
||||
|
#2105
14.04.2022, 08:47
|
||||
|
||||
|
Danke Stefan,
das wäre ggf. etwas für später. Da ich ja versuchen will, noch in diesem Jahr endlich mal - wenigstens für einige Tests - aufs Wasser zu kommen, werde ich erstmal mit der Seilsteuerung weitermachen. Ich hoffe ja, dass das einfach und verlässlich ist.
__________________
Gruß, Günter
|
||||
|
#2106
14.04.2022, 10:02
|
||||
|
||||
|
Ich habe jetzt nicht noch mal nach deiner geplanten Motorisierung geschaut und weiß von daher nicht, ob meine Erfahrung dazu passt. Ich hatte am alten Boot vom Vorbesitzer eine Seilzuglenkung verbaut, die war wohl für einen 5 PS AB gedacht. Mit meinem 55 PS Zweitakter Ging das in Verdrängerfahrt auch noch gut, aber in Gleitfahrt war das nicht mehr zu lenken. Ich hatte die Befürchtung, es reißt mir das Lenkrad aus der Verankerung. Da sind schon ordentliche Kräfte am Werk. Ich hoffe, das passt bei dir.
__________________
Liebe Grüße von der Lahn, Roland
|
||||
|
#2107
14.04.2022, 10:36
|
|||||
|
|||||
|
Zitat:
dieses "Zucken" kenne ich, das ist mir mit der Servoansteuerung auch passiert und anfangs hatte ich es auf mein Programm geschoben. Daran lag es aber nicht. Der Controller erzeugt sich aus den 12V seine eigene 5V Steuerspannung für die Elektronik. Die 5V liegen an dem +5V Pin also schon an. Mit dem Servokabel legt man jetzt zusätzlich eine externe 5V-Spannung an den 5V-Pin, was dieses Zucken verursacht. Bei mir hat es geholfen, für die Ansteuerung vom Servokabel nur den (weißen, gelben oder orangen) Steuerdraht zu benutzen. Danach waren die Zuckungen weg und der Servo lief auch deutlich sanfter an. Hast du an dem +5V-Pin auch eine externe 5V-Spannung dran? Dann nimm die mal spaßeshalber weg (Also nur den Poti zwischen +5V und GND und den Mittelabgriff auf ADC). Auf diesem Foto (hab doch noch eins gefunden) 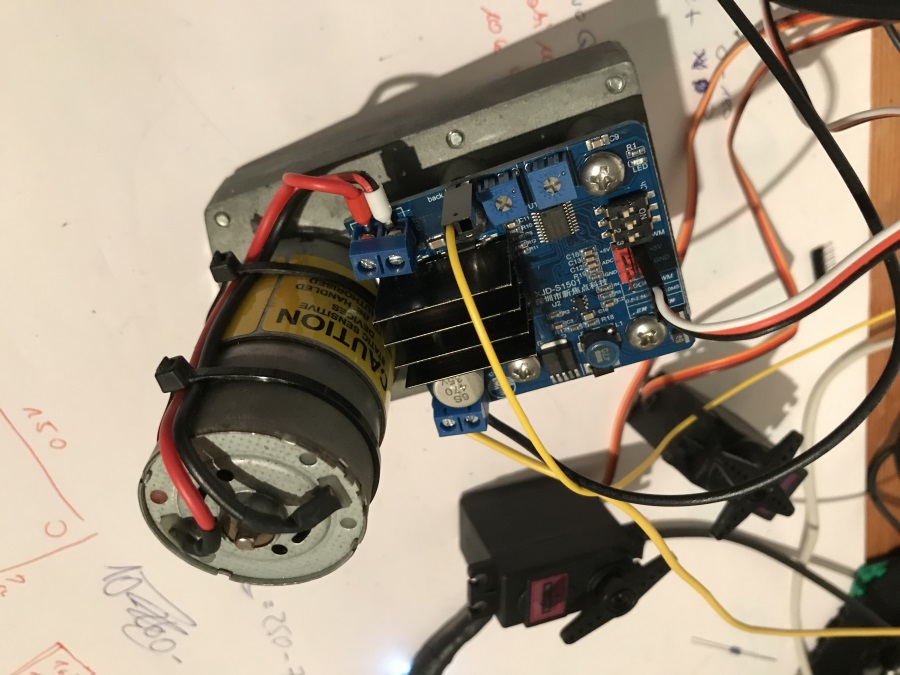 ist noch die zuckende Originalbeschaltung zu sehen und auch der Rückmeldekontakt, über den wir schon spruchen. Außerdem hat es geholfen, einen möglichst großen Potiknopf zu verwenden. Das erlaubt eine feinfühligere Bedienung. Ich hab damals nichts passendes gefunden, also ist es ein Eigenbau geworden aus einem (Keine-Werbung)-Plastikdosendeckel, in den ich eine passende Wellenbuchse eingegossen hab. Der hat 70mm Durchmesser. 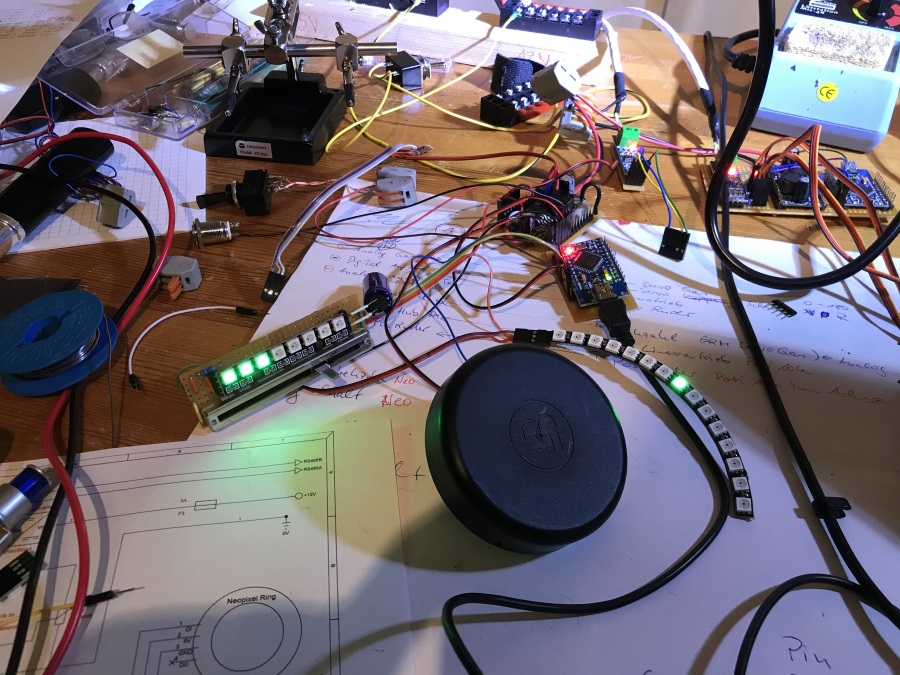 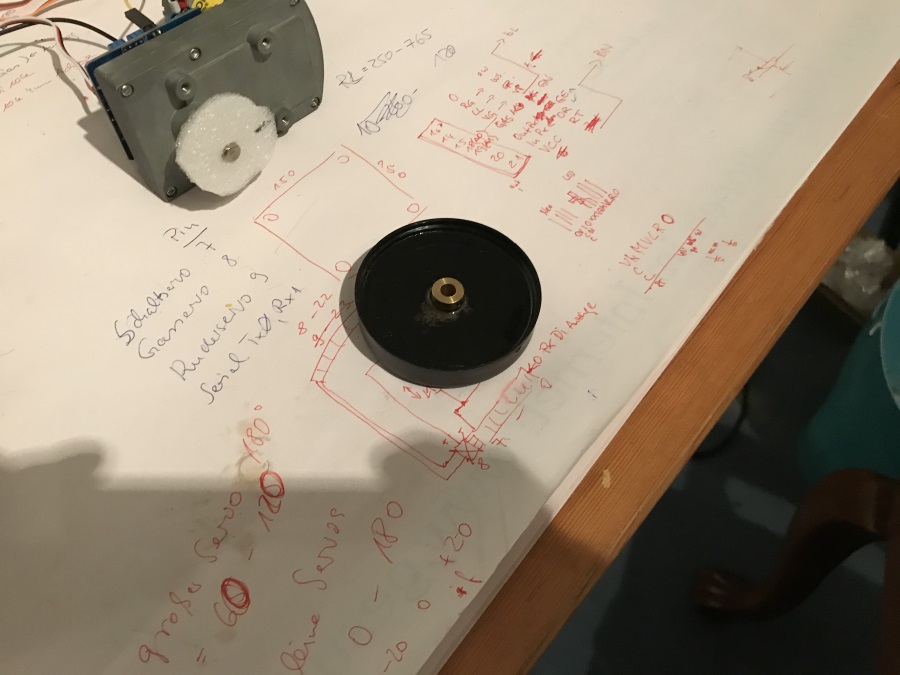
__________________
LG, Holger _\|/_ Das Gras wächst nicht schneller, wenn man dran zieht _\|/_ Im Bau: Eco 65 classic "Galadriel" YachtClub Warnow e.V.
|
|||||
|
#2108
14.04.2022, 19:45
|
|||||
|
|||||
|
Zitat:
betreibst du ihn mit 12 V? Wenn ich mich nicht irre, ist er für 24 V ausgelegt, jedenfalls funktioniert er damit und der Motor zeigt auch eine entsprechende Angabe; auf der Platine erkenne ich dazu allerdings nichts. Vor längerer Zeit hatte ich ihn, um irgendetwas auszuprobieren, auch schon mal an 12 V, weil nur diese Spannung zur Hand war. Dann läuft er in der Tat sanfter, braucht allerdings auch für eine bestimmte Winkeländerung (Output) entsprechend länger und kommt deswegen ein bisschen "schlaftablettig" rüber. Aber vielleicht ist es ja in Anbetracht der konkreten Verhältnisse gerade das richtige, mit 12 V zu arbeiten. Das Vermögen, zügig zu Drehen, war mir früher mal wichtig wegen des ursprünglich gehegten Gedankens, zum Aufstoppen schnell um 180° drehen zu können. Davon habe ich mich aber schon lange verabschiedet. Ungünstig bei 12-V-Betrieb könnte allerdings sein, dass sicherlich auch das Drehmoment kleiner wird. Konflikte mit Fremdspannung im Input habe ich nicht, weil ich bisher immer nur ein einfaches Poti als Stellglied verwendet habe, das die Spannung auf der Platine nutzt. Du benutzt ja, glaube ich, PWM als Eingangsgröße. Dann hat mich heute mein Junior darauf gestoßen, dass es doch günstiger wäre, wenn das Verhältnis von Drehwinkel am Poti und der dazugehörigen Widerstandsänderung besser wäre. Und da fiel mir ein, dass ich genaus aus solchen Überlegungen vor zwei, drei Wochen ein dreigängiges Poti zum Ausprobieren gekauft hatte. Vorhin habe ich das mal eingesetzt und natürlich ist das Verhalten des Servos damit deutlich friedlicher. Ich konnte damit sogar das weiter oben erwähnte Getriebespiel austesten, also den Motor nur soweit laufen lassen (in wechselnden Drehrichtungen), dass sich an der Ausgangswelle keinerlei Bewegung zeigte.
__________________
Gruß, Günter Geändert von Heimfried (14.04.2022 um 19:56 Uhr)
|
|||||
|
#2109
14.04.2022, 20:21
|
||||
|
||||
|
Hallo Günter,
ich nehme mal an, daß Du das Servo (PaidLink) hast. Da ist die Betriebsspannung 8 - 30V und in der Erklärung steht auch "Rated Voltage: 8-30V. The larger the voltage, the larger the torque and speed...also Nennspannung: 8-30 V. Je größer die Spannung, desto größer das Drehmoment und die Drehzahl" und bei 24V hast Du für einen Stellwinkel von 60° eine Stellzeit von 0,5s!!! das würde doch bedeuten, daß der Motor mit einem Lenkeinschlag von 120° in einer Sekunde von links nach rechts gerissen wird (wenn die Übersetzung vom Servor zum Motorschaft 1:1 ist). Das schaffe ich z.B. mit meinem Hexlein nicht!! Es stehen leider für 12V keine Werte in der Beschreibung, aber ich denke mit 12V arbeitet das Servo vernünftig genug und ausreichend Drehmoment dürfte da auch noch da sein.
|
||||
|
#2110
14.04.2022, 22:05
|
||||
|
||||
|
Hallo Jens,
das verlinkte Servo sieht zwar so aus wie meines, aber Unterschiede könnte es da trotzdem geben. Hier sind ja relativ viel technische Angaben gemacht, aber gleichzeitig gibt es Widersprüche und Unklarheiten, jedenfalls für mich. Oben heißt es unter Technical Parameters Speed: 5RMP/MIN@24V; soll wohl heißen 5 RPM bei 24Volt. Das sind 5 * 360° = 1800° Drehwinkel pro 60 Sekunden = 30°/s . Weiter unten steht, wie du sagtest: Rated Speed @24V: 0.5S/60°, was immerhin die vierfache Geschwindigkeit ist. Wat denn nu? Einmal heißt es: PWM Control Mode: 20HZ@1.0-2.0ms or 0.5-2.5ms, dann wieder PWM Control @50-333Hz: 1.0-2.0ms. 0.5-2.5ms Es heißt: Precision: 330°/1023 | 330°/4096 was, wie ich vermute, die digitale Auflösung der Winkel bedeuten soll. Auch hier ist mir unklar, welcher Wert unter welchen Bedingungen gilt. Ich habe ja mittlerweile 5 dieser Servos hier liegen. Die ersten beiden hatte ich gekauft, als Holger auf diese Geräte hingewiesen hat und das Angebot verlinkt hatte (glaube ich jedenfalls). Nachdem er eine Weile später das defekte Poti festgestellt hatte und dann auf das andere Modell mit der Hall-Effekt-Kontrolle überging, schien mir das sehr plausibel (kein mechanischer Verschleiß) und ich habe die mutmaßlich besseren Servos auch bestellt, weil ich ja in der Bootssteuerung verläßliches Funktionieren möchte. Die beiden ersten habe ich aber nicht zurückgegeben, erstens war daran nichts defekt und zweitens habe ich mir gedacht, dass allein schon das Metallgetriebe mit dem Motor den Preis wert ist. Damals ging es aber mit Corona heftig los und der chinesische Händler konnte die neu bestellten nicht liefern. Ich bekam dann schnell mein Geld zurück. Monate später war das Angebot wieder sichtbar und ich habe die Geräte erneut bestellt, diesmal gleich drei davon, damit ich im Fehlerfall schnell austauschen kann. Die Geräte habe ich nach dem Eintreffen auch getestet, sie haben alle funktioniert, jedoch war das Antwortverhalten (Rampenzeiten des Motors u. ä.) für mich deutlich unschöner, als das der ersten Geräte (mit Poti). Jetzt bei der Testinstallation hat das Gerät auch noch einen sehr unangenehmen Pfiepton ausgegeben, wenn es gearbeitet hat. Außerdem hat es keinen Winkelbereich von 330° wie angegeben, sondern nur etwa 200°. Das kann man wohl einstellen, aber ich weiß nicht wo. Ich habe gestern deswegen erstmal wieder ein "altes" Gerät eingebaut. Ich breche jetzt meinen Roman ab, habe mehr als genug herumgenölt.
__________________
Gruß, Günter
|
||||
|
#2111
14.04.2022, 22:09
|
||||
|
||||
|
Hallo Roland,
nein, ich glaube, hohe Kräfte aus Bootsgeschwindigkeit und Motorleistung werden bei mir nicht zu einem Problem anwachsen. An jedem Katamaran-Halbrumpf habe ich einen Antrieb von knapp 1,5 kW (Leistungsaufnahme).
__________________
Gruß, Günter
|
||||
|
#2112
15.04.2022, 08:01
|
|||||||
|
|||||||
|
Moin Günter,
Zitat:
Gerade wenn es um technische Daten von chinesischen Herstellern geht, widersprechen die sich stellenweise extrem von der einen zur anderen Zeile. Meines Erachtens liegt das aber daran, dass die klassischen Übersetzungsprogramme bei technischen Daten völlig überfordert sind Bei den Artikelbeschreibungen ist das ja zum Teil noch ganz lustig. Da brauch man sich nur hinzustellen, eine Stimme wie von Torsten Sträter aufsetzen und sowas laut vorlesen: Zitat:
 Oder: Zitat:
Ich finde es einfach nur lustig! Nur bei den Datenblättern vergeht einem dann das Lachen, wenn nach 4-8 Wochen die Bestellung geliefert wird, nicht passend ist und die nächste Folge der Unterhaltungsshow auch wieder erst in 2 Monaten folgt. Mio
__________________
 If you want to build a boat, don't think about it, just start it. If you think about it, you won't do it. - Luke Powell Baubericht Morbic 12 von Francois Vivier
|
|||||||
|
#2113
15.04.2022, 14:44
|
|||||
|
|||||
|
Zitat:
Hallo Günter, so schlimm ist es eigentlich gar nicht. Die in diesen Servos verbauten Motoren sind immer die gleichen, daher kann man sich die Daten für irgendeinen suchen. Ich meine, das Datenblatt hatte ich dir schon mal geschickt, sicherheitshalber hänge ich's hier mit an. Die Controller variieren, sind aber in ihrer Funktionalität auch immer sehr ähnlich, manche Funktionen fehlen oder sind über ein Mäuseklavier realisiert. Im Datenblatt kann man z.B. die Drehrichtung umkehren und die 5V vom Controller abschalten und diesen extern versorgen. Bei meinem habe ich das nicht gefunden. So, wie die Einstellungen bei mir sind, funktionieren sie am Arduino. Andere Servocontroller liefern andere Pulsweiten, dann muss man möglicherweise am Mäuseklavier entsprechend anpassen. Wie gesagt, es funktioniert am Arduino, einen anderen Controller habe ich nicht, daher hab ich damit nicht herumgespielt. Für den Winkel ist der dem Motor abgewandte blaue Trimmer zuständig. Der verändert den Winkel symmetrisch von der Mittelposition aus, es verschieben sich also immer Anfangs- und Endposition gleichermaßen. Der andere dient der Strombegrenzung im Fall einer mechanischen Blockierung. Ich könnte mir vorstellen, dass man damit auch das Anfangsdrehmoment gegen eine Last etwas begrenzen kann. Vielleicht bringt es was, wenn du den etwas gegen den Uhrzeigersinn drehst... Ich weiß, das hat jetzt sicher nicht alle deine Fragen beantwortet, aber vielleicht ein paar Frohe Ostern, auch an alles Mitleser 
__________________
LG, Holger _\|/_ Das Gras wächst nicht schneller, wenn man dran zieht _\|/_ Im Bau: Eco 65 classic "Galadriel" YachtClub Warnow e.V.
|
|||||
|
#2114
15.04.2022, 16:17
|
|||||
|
|||||
|
Danke Holger,
ja, dieses Papier hattest du mir schon mal gesandt. Ich konnte es auf meinem Rechner aber trotz mehrerer Suchen nicht mehr auffinden. Wahrscheinlich habe ich die Datei nicht vernünftig benannt. Zitat:
Seit meinem Versuch vom Mittwoch, über dessen Ergebnis ich wenig erfreut war, habe ich ja von vielen Menschen hier nützliche Hinweise bekommen, das ist Stoff genug, in der Sache weiter zu probieren und veränderte Ansätze zu suchen. Nochmal danke an alle Helfer.
__________________
Gruß, Günter Geändert von Heimfried (15.04.2022 um 16:26 Uhr)
|
|||||
|
#2115
25.04.2022, 10:45
|
||||
|
||||
|
Die Konzeption und die Realisierung der Steuerung der Trolling-Außenborder ist weit schwieriger als vermutet. Ich habe jetzt den zweiten Motorkopf demontiert und durch den Aufbau mit dem Servo ersetzt. Es funktioniert, aber glücklich bin ich damit irgendwie doch nicht. Als Stellglied habe ich jetzt, wie schon weiter oben geschrieben, ein Dreigangpoti eingesetzt. Das bringt ein angenehmeres Ansprechverhalten des Servos, zeigt aber eben auch noch deutlicher das bereits erwähnte Getriebespiel. Umgedreht bedeutet das, dass ich aus der Position des Stellpotiknopfes nicht genau die Lage des AB-Motors erkennen kann, was, wie ich fürchte, dazu führen könnte, dass ich bei Fahrt voraus die ganze Zeit den Kurs korrigieren muss.
Die Seilsteuerung, die ich als simple und verläßliche Rückfallebene bauen will, kommt aus rein räumlichen Gründen an gewisse Grenzen. Ich habe jetzt zwar das Steuerkabel mit 2 mm Durchmesser hier, welches wohl der Sache angemessen ist, habe aber weniger als 60 cm Breite und weniger als 20 cm Länge pro Halbrumpf, was nicht im mindesten ausreicht, um Umlenkrollen und Spannfedern in üblicher Weise anzubringen. Einen Sprung in der Höhe muss ich in diesem engen Raum auch noch irgendwie bewältigen. Da muss ich wohl noch viel tüfteln.
__________________
Gruß, Günter
|
||||
|
#2116
26.04.2022, 10:21
|
||||
|
||||
|
Mahlzeit Günter,
Du sprichst von viel Spiel im Bezug auf die Elektronische Lenkung... wenn ich mir die Teleflexlenkung an meinem Hexlein angucke, ist da auch ein gewisses Spiel vorhanden; bedingt durch die Verbindung Lenkkabel zum Tillerarm und dann zum AB. Im Fahrbetrieb merkt man das aber sogut wie nicht, auch muß ich keine Korrekturen machen. Spielfrei ist da wohl nur die Pinnenlenkung z.B. an einem Segelboot. Zu deine elektronischen Lenkung: meine "Funke" hat da eine Expotentialfunktion, damit in dem "sensiblen" Bereich eine große Hebelbewegung möglich ist, was sie dann zu den Endpunkten wieder ausgleicht. Desweiteren kann ich die Servoendposition auch am Sender festlegen, allerdings nur weniger als es das Servo vorgibt. Ein 60° Servo läßt sich also nur auf 60° Ruderweg oder weniger einstellen. Wird ein größerer Winkel gebraucht, muß ich ein Servo mit 90 oder 120° einbauen. Die großen "Powerservos" haben da eine eigene Einstellmöglichkeit...ich glaube bis 320°; Holger schrieb da schonmal dazu. Ich weiß jetzt nicht, was Du zur Erzeugung des PWM Signal verwendest und ob da eine Epotial-Funktion möglich ist. Ich werde bei meiner Bugmotor - Lenkung eine maximale Drehbewegung des (nicht Knüppels - sondern) Steuerrad von max. 180° einrichten, weil es auch als "Querstrahler" arbeiten soll. Die Bewegung des Steuerrades für die Lenkung des AB wird in etwa des Ausschlages des AB´s entsprechen...~ 60°. Damit habe ich die Kontrolle, wo in etwa der Ruderausschlag ist. Leider ist das noch nicht in der Bauphase, so daß ich dir da keine genaueren Tips geben kann. Vielleicht hat Holger zum Theme Epotential-Möglichkeit der Steuerpotis per Arduino eine Lösung. Eine "Notfall-Lenkung habe ich auch geplant, die ich allerdings mit eine Teleflex-Lenkung realisiere. Es kann durchaus sein, daß ich im späteren Fahrbetrieb nur die Teleflexlenkung nutze, weil ich ein "richtiges" Lenkrad habe. Das ist aber auch nur einem Zufall eschuldet, denn es gab damals ein Saisonende-Sonderangebot für die langen Teleflexlenk kabel, wo das Angebot wohl unter 100€ lag. Geändert von shakalboot (26.04.2022 um 10:31 Uhr)
|
||||
|
#2117
26.04.2022, 19:46
|
|||||
|
|||||
|
Zitat:
am Arduino ist der Poti ein Eingang und der Servo ein Ausgang, was dazwischen passiert, ist Sache der Programmierung. Da geht alles, was der Arduino-Befehlssatz hergibt, auch eine Exponentialfunktion. Gesendet von iPhone mit Tapatalk
__________________
LG, Holger _\|/_ Das Gras wächst nicht schneller, wenn man dran zieht _\|/_ Im Bau: Eco 65 classic "Galadriel" YachtClub Warnow e.V.
|
|||||
|
#2118
26.04.2022, 22:19
|
||||
|
||||
|
Danke Jens, danke Holger,
zunächst mal will ich beim passiven Stellglied bleiben, dem linearen Poti. Seit ich das Dreigangpoti probiert habe, ist für mich klar, dass die Eingabe einer sehr kleinen Drehung am Potiknopf damit kein Problem mehr ist. Der mechanische Drehbereich eines Standardpotis liegt meist bei etwa 270°, das 3-Gang-Poti bietet 3 * 360° = 1080°, das ist das Vierfache. Das angesprochene Spiel ist wirklich rein mechanisches Getriebespiel. Mir ist natürlich klar, dass jede Art der Steuerung ein gewisses Spiel mit sich bringt und wahrscheinlich überschätze ich auch die mögliche Auswirkung in der Praxis, weil mir jetzt "im Laborversuch", also im Probeaufbau in der Werkstatt, das Spiel als sehr groß erscheint. Die Potis, die in meinen Haswings als "Gaspedal" dienen, habe ich jetzt ausgebaut und durchgemessen, sie haben gut 12 Kiloohm Gesamtwiderstand und bei 4 k im Abgriff liegt die Motordrehzahl Null. Von 0 bis 4 wird also der Rückwärtsgang angesprochen, sprich rechtsdrehender Motor, höchste Drehzahl bei 0. Von 4 bis 12 dreht der Motor links herum (LH-Prop) und es geht vorwärts, höchste Drehzahl mit 12. Im Moment rolle ich Vorstreichfarbe, Heckpartie BH5 oberhalb des Brückendecks, Bachskistendeckel und -fronten. Dazu immer mal wieder kleinere Laminat- Epoxi- und Schleifarbeiten. Dazu habe ich auch Rollenkork (5 mm) geliefert bekommen und, nach langem Hin und Her, vor einer Woche Pappelsperrholz als Innenverkleidung gekauft. Als Aufbau der Kajütwände ist jetzt geplant (von außen nach innen) 6 mm Sperrholz (dies natürlich in "Marinequalität"), 20 mm Hartschaumdämmung im Gefach (die Fächer werden gebildet durch Kiefernleisten, ca. 26 mm) 5 mm Kork ("Trittschalldämmung") zum Auffüllen der Gefache und schließlich "großflächig" 4 mm Pappelsperrholz über Gefache und Leisten. Die andere Korksorte ist "Industriekork", laut Händler besonders dicht und für hohe Belastungen geeignet. Der soll als Fußbodenbelag in der Kajüte dienen und eigentlich auch auf dem Achterdeck und dem Vordeck. Tips und Erfahrungen mit Korkbelag in Booten, speziell außen, nehme ich sehr gern entgegen.
__________________
Gruß, Günter Geändert von Heimfried (26.04.2022 um 22:26 Uhr)
|
||||
|
#2119
29.04.2022, 18:49
|
||||
|
||||
|
In den letzten Tagen habe ich geklebt und "beschichtet". Das Kajütdach hat jetzt die Kantenleisten bekommen, die ich im Herbst vorbereitet hatte. Dann habe ich Vorstrichfarbe aufs Heck, die Backskistendeckel und -fronten gebracht und die erste Schicht Lack aufs Heck.
Es kam noch ein Scheibenwischermotor ohne jedes Stück Begleitpapier. Damit meine ich keinen Lieferschein, sondern so etwas wie eine Installationsanleitung, Gebrauchsanweisung oder wenigstens technische Daten. Im Netz finde ich auch nichts. Der Motor wird im Auftrag von Osculati in China produziert und auf der Osculati-Seite kann man gerade mal eine technische Zeichnung herunterladen, aus der sich wenigstens die vier Anschlusslitzen den Funktionen zuordnen lassen. Es gibt auf der Seite auch noch einen Button "Instructions", der lässt sich zwar klicken, aber es kommt dann mal nichts und mal die gleiche Zeichnung. Wichtig für mich ist die Einstellung des Wischwinkels. Es gibt da zwar eine Schraube mit (Konter-)Mutter, die wohl dafür zuständig sein wird, aber das wüsste ich schon gern aus befugtem Munde, bevor ich daran herumprobiere und die Gefahr eingehe, dabei etwas zu vermurksen.
__________________
Gruß, Günter
|
||||
|
#2120
29.04.2022, 19:05
|
||||
|
||||
|
Hallo Günter,
der sollte baugleich mit diesem sein: https://www.bukh-bremen.de/additiona...36_0_50784.pdf Gesendet von iPhone mit Tapatalk
__________________
LG, Holger _\|/_ Das Gras wächst nicht schneller, wenn man dran zieht _\|/_ Im Bau: Eco 65 classic "Galadriel" YachtClub Warnow e.V.
|
||||
|
#2121
29.04.2022, 20:20
|
||||
|
||||
|
Danke Holger,
wahrscheinlich nicht ganz baugleich, aber in den entscheidenden Punkten sicherlich schon. Und, wie passend zu meiner gerade oben geäußerten Skepsis, schon auf der "Titelseite" des Manuals eine Warnung davor, an der Schraube zu drehen, von der ich meinte, daran sei wohl der Wischwinkel einzustellen.
__________________
Gruß, Günter
|
||||
|
#2122
03.05.2022, 14:58
|
||||
|
||||
|
Der nächste Stolperstein für meinen Weg zum Scheibenwischer. Nachdem Motor und Wischer schon eine Weile da sind, kam heute der nachgelieferte Wischerarm, wie bisher ohne jegliche Anleitung.
Wenn ich die Wischerblätter am Auto meiner Frau wechsle, brauche ich keine Anleitung, weil die Teile ihre Funktion selbst erklären, wenn man sie nur ansieht. Aber hier bin ich ratlos. Das Wischerblatt hat an der Kupplungsstelle ein Kunststoffteil (auf dem Foto rausgenommen und daneben platziert) und der Wicherarm ist ein Flachprofil 3,3 mm stark und 8,5 mm breit zu einer U-Form gebogen. Dieses Ende ist sehr steif und ich sehe nicht, dass man das Kunststoffteil irgendwie "einclipsen" könnte. Die lichte Weite im U beträgt 7 mm und das Kunststoffteil ist 14 mm stark. Rein kann der Metallbügel da auch nicht, weil es eine beidseitig offene Struktur ist. Hat jemand einen Tip?
__________________
Gruß, Günter
|
||||
|
#2123
03.05.2022, 19:16
|
|||||
|
|||||
|
Zitat:
__________________
Volker, der irgenwann auf´s Meer will.... Minchen war ein gutes Schiff, es kühlte mein Bier, backte Brötchen auf und durch die Gegend fuhr es mich auch new boat coming soon
|
|||||
|
#2124
03.05.2022, 19:25
|
||||
|
||||
|
Danke Volker,
gerade habe ich ein zweites Kunststoffteil gefunden, welches anscheinend passt. Das hatte ich in dem Plastikbeutel übersehen. Du warst auf der richtigen Fährte.
__________________
Gruß, Günter Geändert von Heimfried (03.05.2022 um 20:13 Uhr)
|
||||
|
#2125
01.06.2022, 14:35
|
||||
|
||||
|
Es geht langsam voran, wobei die Betonung auf langsam liegt. Zum Dämmen der Bugkoje hatte ich zum Glück wieder mal des Sohnes Hilfe. Das ist sehr wichtig, weil Arbeiten auf den Knien und in liegend überkopf an engen Stellen für meine alten Knochen extrem mühsam sind. So haben wir an einem Tag mehr geschafft, als ich in einer ganzen Woche zusammengekriegt hätte.
(René: Apfelsine statt lila!)
__________________
Gruß, Günter
|
||||
|
|
| Themen-Optionen | |
|
|
 Ähnliche Themen
Ähnliche Themen
|
||||
| Thema | Autor | Forum | Antworten | Letzter Beitrag |
| Hausboot Bau | fastjack | Selbstbauer | 57 | 29.11.2014 17:32 |
| Bau eines Hausboot | mach-mich-schlau | Technik-Talk | 1 | 17.02.2014 11:40 |
| 8mx3m Hausboot - benötige Tips für Bau und Bürokratie | Kasumi | Selbstbauer | 50 | 02.10.2013 12:40 |
| Mir fehlt eine Idee.....zum Bau eines kleinen Lichtmastes | hansenloewe | Allgemeines zum Boot | 25 | 01.01.2006 14:30 |
| Bau eines 2ten Fahrstandes | MMark | Selbstbauer | 23 | 12.12.2005 08:02 |












